The Art of Robustness: Surviving Failures in Robotics
Room 105, Hangzhou International Expo Center, Hangzhou, China
October 20, 2025, 9:00 AM – 13:00 PM
Introduction
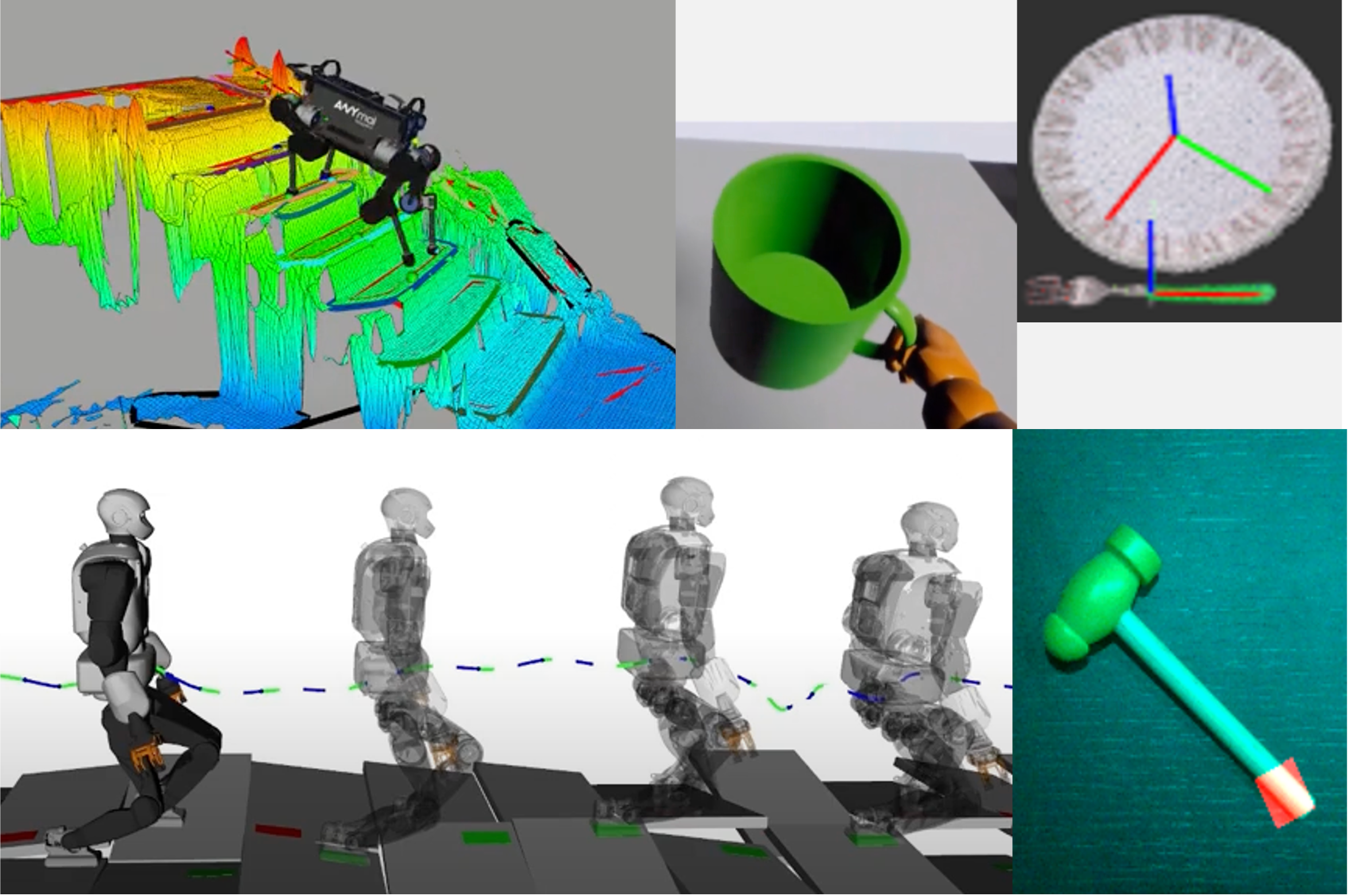
In recent years, we have seen significant advancements in robotic systems. Humanoid robots can perform complex tasks, mobile manipulators show promise in logistics and industrial applications, and exoskeletons enhance human capabilities. However, deploying robots in real-world applications still remains challenging. A primary bottleneck is the occurrence of failures that compromise the robustness of robotic systems, limiting their reliability in practical scenarios. Below is a video showing robot failures experienced by the workshop organizers, illustrating the impact of these failures in real-world settings.
The primary objective of this workshop is to provide a platform for discussing the key challenges that lead to failures in robots, such as perceptual noise, uncertainty in model-based methods, limited generalizability in learning-based methods, and exploring innovative solutions to mitigate these issues, thereby improving the robustness of robotic systems. Additionally, the workshop will also feature practical aspects often overlooked in academic papers, e.g., system integration and debugging processes to address failures. The workshop will bring together world-renowned researchers and practitioners from diverse fields, including whole-body model-based control, robot learning, perception and sensing, system engineering, to share their insights and experiences. The workshop will feature invited talks, poster sessions, and panel discussions, offering attendees a comprehensive understanding on robustness challenges in robotics and highlight the latest advancements and strategies for addressing these obstacles.
Topics of Dicussion and Interest
Fundamental Algorithms
- Model-based and learning-based methods, and combinations of them
- Scalability, generalization, and adaptability
- Real-time computation
- Perception and sensing techniques
- Failure recovery algorithms

Real-World Implementation
- Hardware design
- Software engineering and system integration
- Sim-to-real transfer
- Evaluation and certification

Practical Aspects
- Nitty-gritty twists often overlooked in academic papers
- Debugging process to address failures
- Attitude and mindset when dealing with failures
Invited Speakers
-

Prof. Kensuke Harada
The University of Osaka
Topic: Realizing robust motion planning for robotic manipulation tasks
-

Prof. Tetsuya Ogata
Waseda University
Latent Representation for Error Recovery in End-to-End Robot Motion Generation
-

Dr. Xiaokun Leng
LEJU Robotics
Topic: Development of Humanoid Robot Technology and its Industrialization
-

Dr. Sylvain Calinon
Idiap, EPFL, Switzerland
Topic: Exploiting Geometric Approaches and Ergodic Control for Robust Manipulation
-

Prof. Dimitrios Kanoulas
University College London
Topic: The Good, the Bad, and the Ugly-Robustness of Robots that have Limbs
-

Dr. Jiaolong Yang
Microsoft Research Asia
Topic: Towards Foundational Robotic Vision-Language-Action Models that Generalize
Call for Posters
We invite researchers to submit short papers on preliminary results, ongoing works, and demos relevant to the workshop via this Link in the form of a short papers (2-4 pages, excluding references).
Submitting a video showing failure cases is optional but highly recommended. We will showcase the most interesting failure videos in the workshop.
Important Dates
- Submission Deadline: 30th September 2025
20th September 2025 - Notification: 5th October 2025
25th September 2025
Three outstanding paper awards will be announced during the workshop, each with a cash prize of 600 USD (pre-tax), sponsored by LEJU ROBOT.
Organizers
-
Jiayi Wang
Beijing Institute for General Artificial Intelligence (BIGAI)
-
Namiko Saito
Microsoft Research Asia Tokyo
-

Henrique Ferrolho
ALL3, London, UK
-

Sethu Vijayakumar
The University of Edinburgh
-

Adrian Röfer
University of Freiburg
-

Yue Gao
Shanghai Jiaotong University
-

Hangxin Liu
Beijing Institute for General Artificial Intelligence (BIGAI)
-

Yao Su
Beijing Institute for General Artificial Intelligence (BIGAI)
-

Song-Chun Zhu
BIGAI, Peking University, Tsinghua University
Sponsors





Contact
If you have any questions, please contact us.
Mail: art-of-robustness-iros2025 [at] googlegroups.com